多臂协同打磨
基于点云的打磨轨迹生成
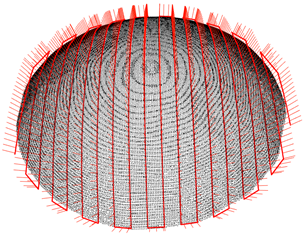
在机器人对自由曲面的工件进行打磨时,往往需要借助工件的三维模型进行打磨轨迹规划。如果已有工件的CAD模型,可以基于该CAD模型进行轨迹规划。但是实际使用过程中由于加工误差、使用磨损导致工件可能和CAD模型有偏差,而且有时往往难以获得工件的CAD模型,此种情况下可使用深度采集设备现场获取工件形状进行规划。本课题使用深度相机现场获取工件的三维点云,并在此基础上进行轨迹规划。
恒力控制
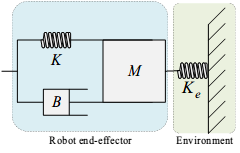
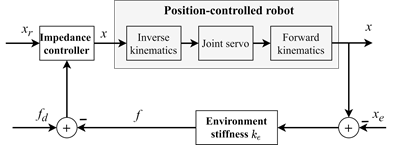
打磨工艺的目的是提升工件表面质量,而非对工件进行去除加工。如果采取传统的位置控制模式,当机器人末端轨迹存在误差时,可能导致机器人与工件发生碰撞,产生巨大的接触力,导致机器人或工件的损坏,因此应采用力控制方法。使用阻抗控制可以实现接触力与位置之间的转换,从而达到力控制的目的。
 |  |
|---|---|
三臂运动学协同
开展了多臂协同打磨工艺,其中两机械臂为夹持臂,负责夹持工件,将工件送到打磨位置,待第三台机械臂(打磨臂)对工件正面进行打磨后,两台夹持臂将工件翻转,打磨臂对工件的其他表面进行打磨。使用机器人夹持工件省去了调整工件姿态、重新装夹的步骤,提高了生产效率。
